About Me

I’m a final year PhD student at University of Pennsylvania, working with Professor Rahul Mangharam in xLab (Safe Autonomous Systems Lab). Previously, I obtained my MS in Robotics at University of Pennsylvania, and my BS in Computer Science and Mechanical Engineering at Georgia Institute of Technology.
- Github
- LinkedIn
- Google Scholar
Research Interest
My research focuses on understanding the fundamental challenges of multi-agent reinforcement learning in robotics, and on improving the robustness and adaptability of autonomous systems in real-world settings. In particular, I study how to enable effective coordination and cooperation among autonomous agents operating in dynamic, uncertain environments, as well as how to synthesize robust, secure, and resilient systems capable of functioning reliably in adversarial or competitive scenarios.
I’m the main developer and maintainer of the Roboracer (formerly f1tenth) platform.
Selected Publications
(* indicates equal contribution, full list of publication on Google Scholar.)
STL-SVPIO: Signal Temporal Logic guided Stein Variational Path Integral Optimization
Hongrui Zheng, Zirui Zang, Ahmad Amine, Cristian-Ioan Vasile, Rahul Mangharam
In Submission, 2026
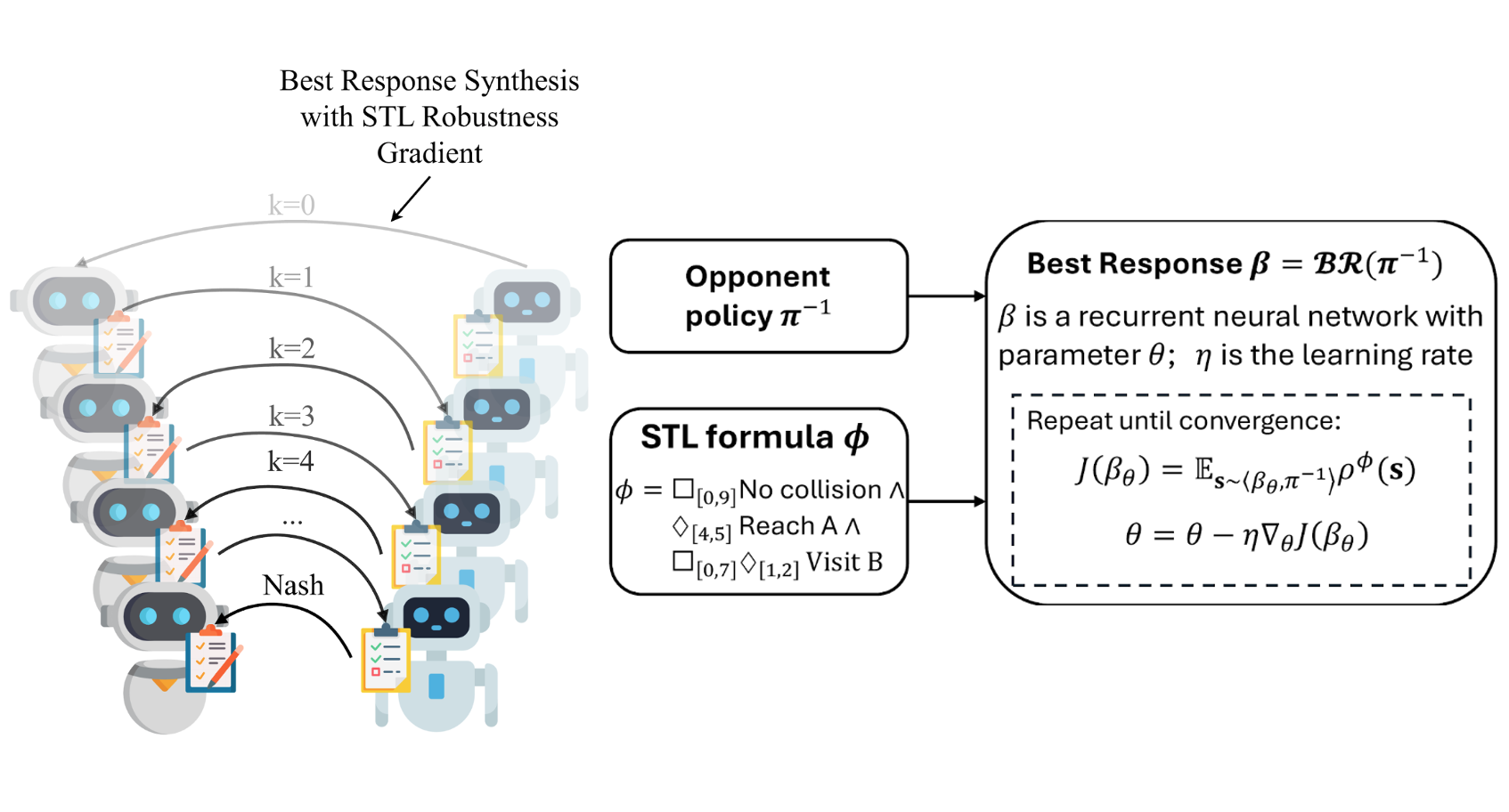
STLGame: Signal Temporal Logic Games in Adversarial Multi-Agent Systems
Shuo Yang, Hongrui Zheng, Cristian-Ioan Vasile, George J. Pappas, Rahul Mangharam
Learning for Dynamics & Control Conference (L4DC), 2025
FormulaZero: Distributionally Robust Online Adaptation via Offline Population Synthesis
Aman Sinha*, Matthew O'Kelly*, Hongrui Zheng*, Rahul Mangharam, John Duchi, Russ Tedrake
International Conference on Machine Learning (ICML), 2020
TUNERCAR: A Superoptimization Toolchain for Autonomous Racing
Matthew O'Kelly*, Hongrui Zheng*, Achin Jain*, Joseph Auckley, Kim Luong, Rahul Mangharam
International Conference on Robotics and Automation (ICRA), 2020
Preprints
Differentiable trajectory generation for car-like robots with interpolating radial basis function networks
Hongrui Zheng
,
Rahul Mangharam
arXiv preprint arXiv:2303.00981, 2023
Link
Game-theoretic objective space planning
Hongrui Zheng
,
Zhijun Zhuang
,
Johannes Betz
,
Rahul Mangharam
arXiv preprint arXiv:2209.07758, 2022
Link
Accelerating online reinforcement learning via supervisory safety systems
Benjamin Evans
,
Johannes Betz
,
Hongrui Zheng
,
Herman A Engelbrecht
,
Rahul Mangharam
,
Hendrik W Jordaan
arXiv preprint arXiv:2209.11082, 2022
Link
Teaching autonomous systems hands-on: Leveraging modular small-scale hardware in the robotics classroom
Johannes Betz
,
Hongrui Zheng
,
Zirui Zang
,
Florian Sauerbeck
,
Krzysztof Walas
,
Velin Dimitrov
,
Madhur Behl
,
Rosa Zheng
,
Joydeep Biswas
,
Venkat Krovi
,
others
arXiv preprint arXiv:2209.11181, 2022
Link
Gradient-free multi-domain optimization for autonomous systems
Hongrui Zheng
,
Johannes Betz
,
Rahul Mangharam
arXiv preprint arXiv:2202.13525, 2022
Link
Conference and Workshop Publications
STLGame: Signal Temporal Logic Games in Adversarial Multi-Agent Systems
Shuo Yang
,
Hongrui Zheng
,
Cristian-Ioan Vasile
,
George Pappas
,
Rahul Mangharam
7th Annual Learning for Dynamics & Control Conference, PMLR, 1102–1114, 2025
Local_INN: Implicit map representation and localization with invertible neural networks
Zirui Zang
,
Hongrui Zheng
,
Johannes Betz
,
Rahul Mangharam
2023 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2023
Link
Bypassing the simulation-to-reality gap: Online reinforcement learning using a supervisor
Benjamin David Evans
,
Johannes Betz
,
Hongrui Zheng
,
Herman A Engelbrecht
,
Rahul Mangharam
,
Hendrik W Jordaan
2023 21st International Conference on Advanced Robotics (ICAR), IEEE, 325–331, 2023
Bridging the Gap between Discrete Agent Strategies in Game Theory and Continuous Motion Planning in Dynamic Environments
Hongrui Zheng
,
Zhijun Zhuang
,
Stephanie Wu
,
Shuo Yang
,
Rahul Mangharam
RoboLetics: Workshop on Robot Learning in Athletics @ CoRL 2023, 2023
Towards explainability in modular autonomous system software
Hongrui Zheng
,
Zirui Zang
,
Shuo Yang
,
Rahul Mangharam
2023 IEEE Intelligent Vehicles Symposium (IV), IEEE, 1–8, 2023
Stress testing autonomous racing overtake maneuvers with RRT
Stanley Bak
,
Johannes Betz
,
Abhinav Chawla
,
Hongrui Zheng
,
Rahul Mangharam
2022 IEEE Intelligent Vehicles Symposium (IV), IEEE, 806–812, 2022
Link
Combinatorial and Parametric Gradient-Free Optimization for Cyber-Physical System Design
Hongrui Zheng
,
Johannes Betz
,
Arun Ramamurthy
,
Hyunjee Jin
,
Rahul Mangharam
2022 IEEE Workshop on Design Automation for CPS and IoT (DESTION), IEEE, 34–41, 2022
Link
Winning the 3rd Japan Automotive AI Challenge: Autonomous racing with the Autoware.Auto open source software stack
Zirui Zang
,
Renukanandan Tumu
,
Johannes Betz
,
Hongrui Zheng
,
Rahul Mangharam
2022 IEEE Intelligent Vehicles Symposium (IV), IEEE, 1757–1764, 2022
Deriving spatial policies for overtaking maneuvers with autonomous vehicles
Jayanth Bhargav
,
Johannes Betz
,
Hongrui Zheng
,
Rahul Mangharam
2022 14th International Conference on Communication Systems & Networks (COMSNETS), IEEE, 859–864, 2022
F1TENTH: An Open-source Evaluation Environment for Continuous Control and Reinforcement Learning
Matthew O’Kelly
,
Hongrui Zheng
,
Dhruv Karthik
,
Rahul Mangharam
NeurIPS 2019 Competition and Demonstration Track, PMLR, 77–89, 2020
Link
TUNERCAR: A Superoptimization Toolchain for Autonomous Racing
Matthew O’Kelly
,
Hongrui Zheng
,
Joseph Auckley
,
Achin Jain
,
Kim Luong
,
Rahul Mangharam
Proceedings of the International Conference on Robotics and Automation (ICRA), 2020
FormulaZero: Distributionally robust online adaptation via offline population synthesis
Aman Sinha
,
Matthew O’Kelly
,
Hongrui Zheng
,
Rahul Mangharam
,
John Duchi
,
Russ Tedrake
International Conference on Machine Learning, PMLR, 8992–9004, 2020
Link
Monocular vision-based human following on miniature robotic blimp
Ningshi Yao
,
Emily Anaya
,
Qiuyang Tao
,
Sungjin Cho
,
Hongrui Zheng
,
Fumin Zhang
2017 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 3244–3249, 2017
Link
Journal Publications
F1TENTH: Enhancing autonomous systems education through hands-on learning and competition
Johannes Betz
,
Hongrui Zheng
,
Felix Jahncke
,
Zirui Zang
,
Florian Sauerbeck
,
Y Rosa Zheng
,
Joydeep Biswas
,
Venkat Krovi
,
Rahul Mangharam
IEEE Transactions on Intelligent Vehicles, IEEE, 2024
Autonomous vehicles on the edge: A survey on autonomous vehicle racing
Johannes Betz
,
Hongrui Zheng
,
Alexander Liniger
,
Ugo Rosolia
,
Phillip Karle
,
Madhur Behl
,
Venkat Krovi
,
Rahul Mangharam
IEEE Open Journal of Intelligent Transportation Systems, IEEE, Vol. 3, 458–488, 2022